The Technology behind Self-Driving Cars
Self-Driving cars are the future, find out the science behinf them.
Do you have similar website/ Product?
Show in this page just for only
$2 (for a month)
0/60
0/180
The Technology behind Self- Driving cars



Consider that you are at leisure while your car drives you to your destination without a chauffeur. Wouldn?t that be amazing?
Today, humanity has taken big paces in scientific technology and its application. One such example of this is the Self- Driving cars. A self-driving car or a robotic car is a vehicle that is capable of sensing its environment and navigating without human input. Self-driving cars are the future of personal transportation and you?ll likely be spending a lot less time behind the wheel. The rise of self-driving cars means that science-fiction adventures as shown in movies are now a reality.
Google v/s Tesla
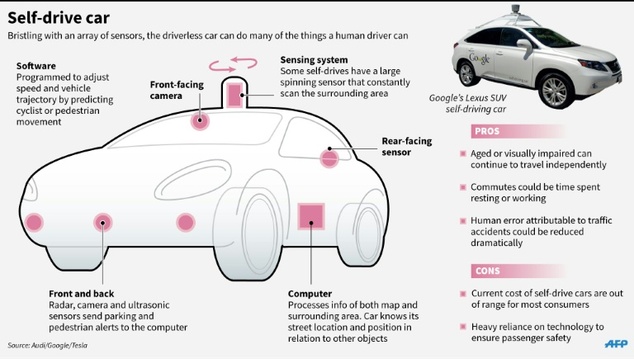
Two companies which are well known for their self-driving cars and most their self-driving advancements are Google and Tesla. Google is using Lidar (a radar-like technology that uses light instead of radio waves) sensor technology and going straight to cars without steering wheels or foot pedals. Tesla has rolled out a software system called Autopilot, which employs high-tech camera sensors as a car?s ?eyes,? to some of its cars already on the market.
Cars today already include many semi-autonomous features, like assisted parking and self-braking systems. Autonomous vehicles which are able to operate without human control are rapidly becoming more of a reality. Google is planning the Google Chauffeur software, which the company hopes to bring to market by 2020.
The Science behind Self-driving cars
Autonomous cars use a variety of techniques to detect their surroundings, such as radar, laser light, GPS, odometry and computer vision. Advanced control systems interpret sensory information to identify appropriate navigation paths, as well as obstacles and relevant signage. Autonomous cars must have control systems that are capable of analyzing sensory data to distinguish between different cars on the road.
The Neural Network
Autonomous cars are being developed with deep learning or neural networks. Deep neural networks have many computational stages or levels in which neurons are simulated from the environment that activate the network.The neural network depends on an extensive amount of data extracted from real life driving scenarios. The neural network is activated and ?learns? to perform the best course of action. Deep learning has been applied to answer to real life situations and is used in the programming for autonomous cars. In addition, sensors, such as the LIDAR sensors already used in self-driving cars; cameras to detect the environment, and precise GPS navigation will be used in autonomous cars.
SLAM (Simultaneous localization and mapping algorithms)
Modern self-driving cars generally use Bayesian Simultaneous localization and mapping (SLAM) algorithms which fuse data from multiple sensors and an off-line map into current location estimates and map updates. SLAM with detection and tracking of other moving objects (DATMO), which also handles things such as cars and pedestrians, is a variant being developed at Google. Simple systems may use roadside real-time locating system (RTLS) beacon systems to aid localization. Typical sensors include the Lidar, stereo vision, GPS IMU. Visual object recognition uses machine vision including neural networks.
Merits
? The potential benefits of autonomous cars include reduced mobility and infrastructure costs, increased safety, increased mobility, increased customer satisfaction and reduced crime. Specifically, there will be a significant reduction in traffic collisions; the resulting injuries; and related costs, including less need for insurance.
? Autonomous cars are predicted to increase traffic flow; provide enhanced mobility for children, the elderly, disabled and the poor; relieve travelers from driving and navigation chores; lower fuel consumption; significantly reduce needs for parking space; reduce crime and facilitate business models for transportation as a service, especially via the sharing economy.
Demerits
? Among the main obstacles to widespread adoption are technological challenges, disputes concerning liability; the time period needed to replace the existing stock of vehicles; resistance by individuals to forfeit control; consumer safety concerns; implementation of a workable legal framework and establishment of government regulations.
? There will be a risk of loss of privacy and security concerns, such as hackers or terrorism; concerns about the resulting loss of driving-related jobs in the road transport industry; and risk of increased suburbanization as travel becomes less costly and time-consuming. Many of these issues are due to the fact that autonomous objects, for the first time, allow computers to roam freely, with many related safety and security concerns.
CONTINUE READING
Technology
News
International
Sandeep Semwal
Content Writer